I have a RosbotXL with the Nvidia Jetson Nano (S/N: 2ccbe2) and I’m having trouble setting it up.
Furthermore LED 2 is flashing red all the time (already when booting the first time, before I even started with the setup process). The status LED on the Nvidia Jetson Nano remains green.
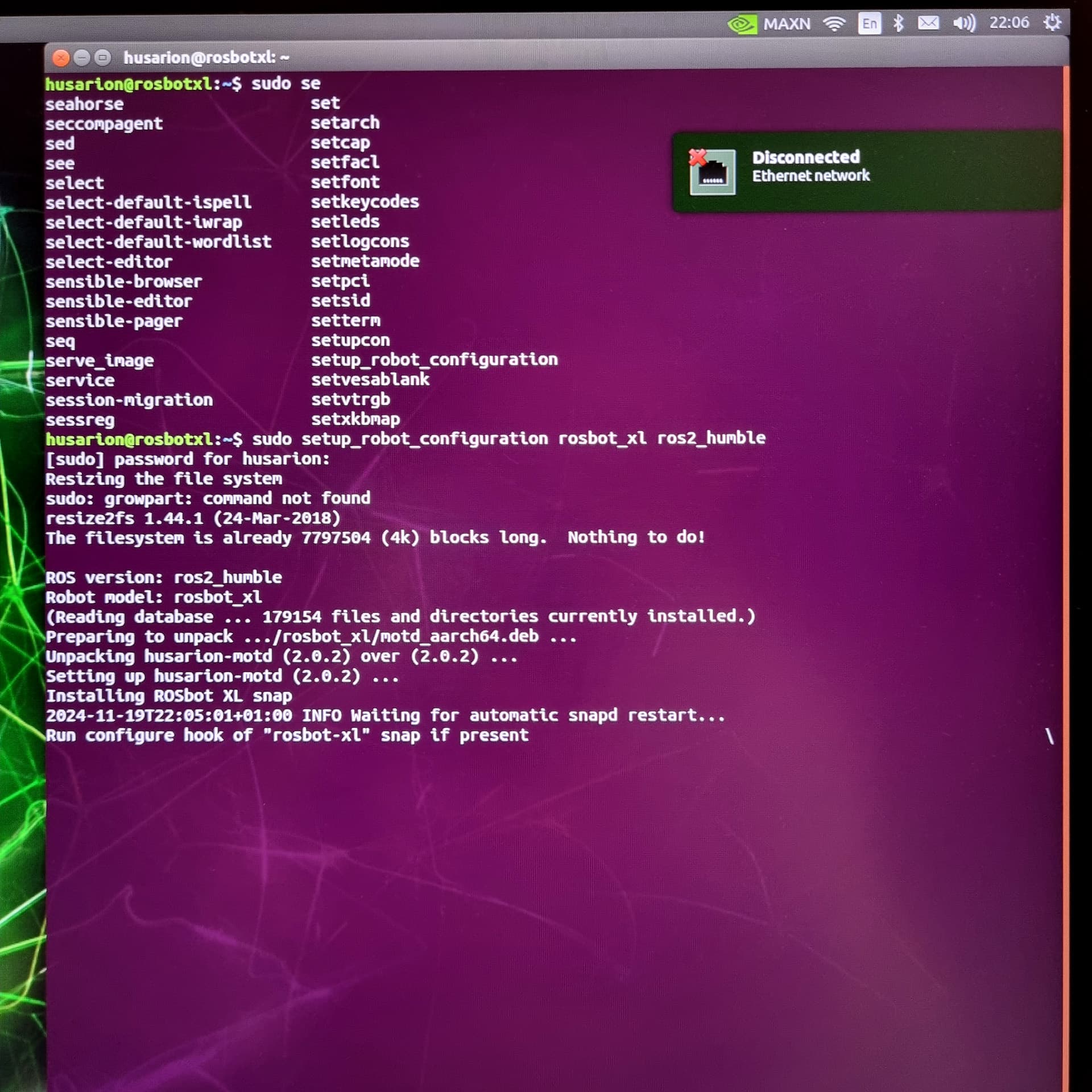
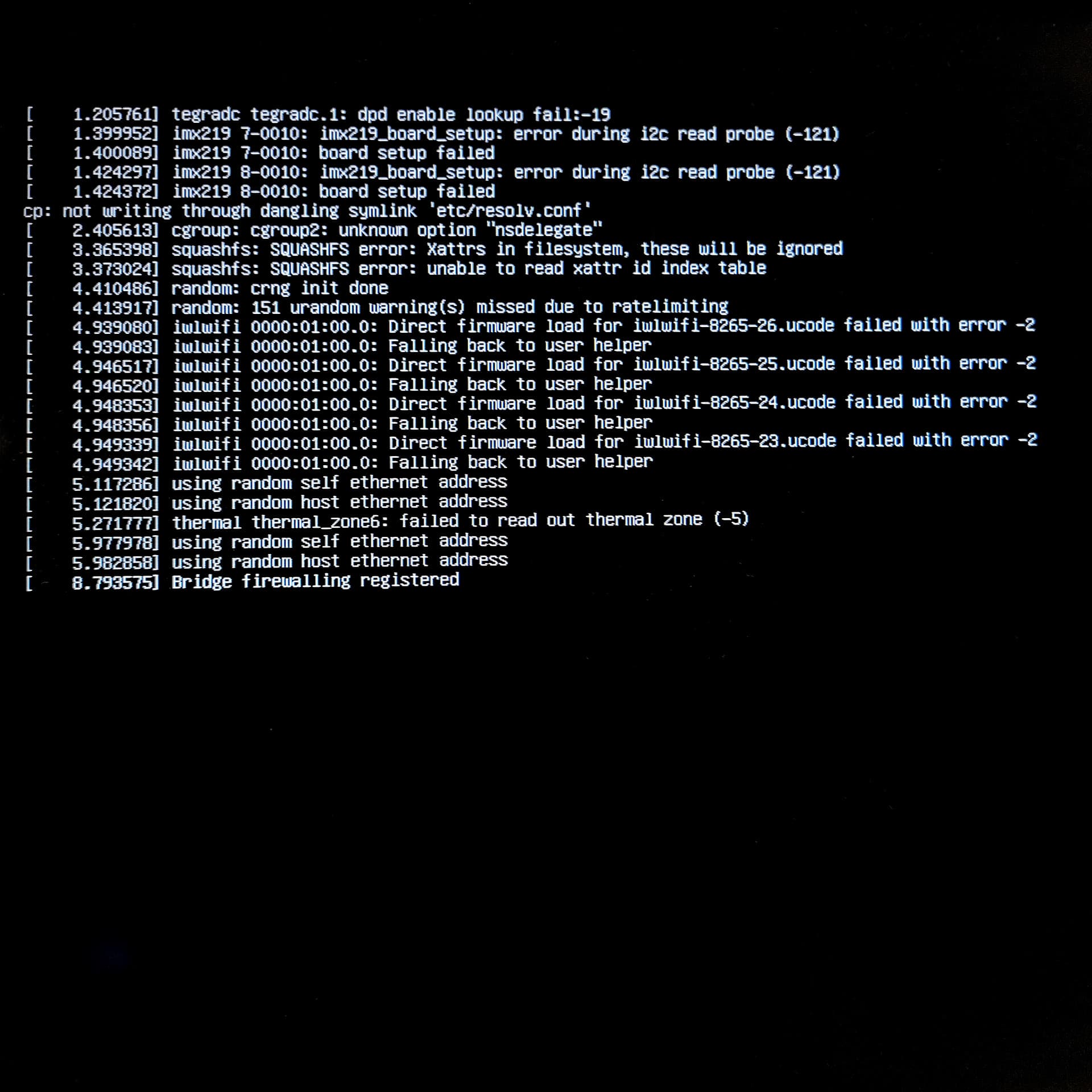
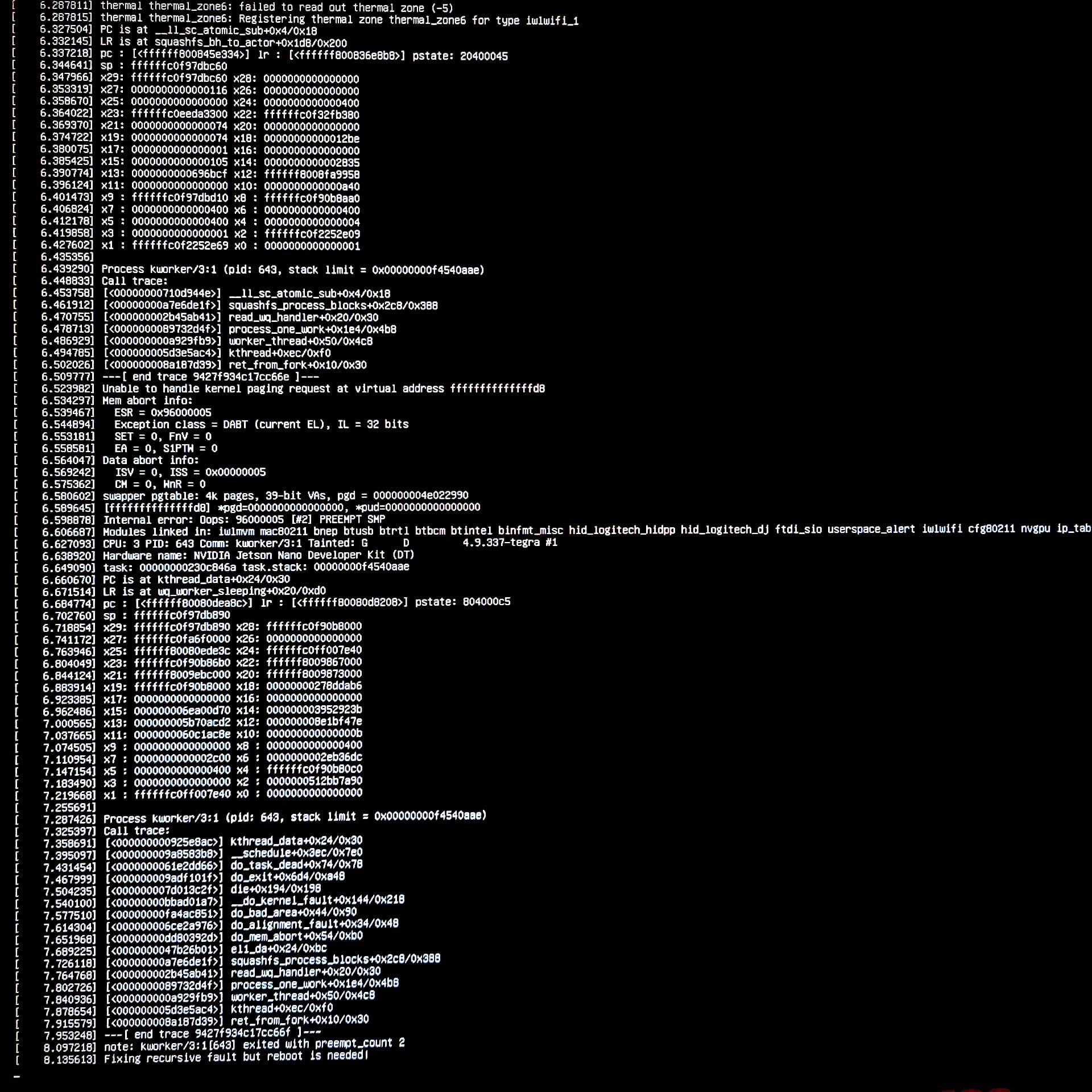
But in step 5, when the setup_robot_configuration script installs the rosbot-xl snap, the message ‘Run configure hook of “rosbot-xl” snap if present’ appears and a few seconds later the image freezes and the system reboots.
The only option left to me is to reflash the SD card.
What I did, step by step:
Created SD card with image (jetson-nano-jp461-sd-card-image.zip), following the linked guide on the Nvidia page.
Set up via HDMI cable and mouse/keyboard (Username: husarion, Computer Name: rosbotxl), set up WiFi
Skipped (Internet connection part) because I have already established the connection with the setup wizard
apt update and netplan installation executed
Robot config installation started:
Cloning the GIT repository and executing the install.sh script works, in the fourth step, then the described error occurs.
Unfortunately, installing cloud-utils didn’t solve the problem.
The “command not found” prompt is now replaced by “NOCHANGE: partition 1 could only be grown by 2015 [fudge=2048]”, but the problem remains the same.
The weirdest part is the continuously red flashing LED 2. According to the manual, this means “Error of RTOS’a or microROS”. Pushing the “MCU reset” button makes the LED light up green for a second, but then the red flashing continues.
When I toggle the third switch of the “DIP switch” from OFF (“MCU boot from FLASH”) to ON (“MCU bootloader active”), LED 2 stops flashing, but that doesn’t solve the problem either.
Hi,
It seems that there is an issue with Snap on Ubuntu 18. The current solution is to check out a pre-Snap commit on the robot-config repo. The rest of the setup guide remains the same.
Could you try this block of code instead of the one specified in the guide?
git clone https://github.com/husarion/robot-configs
cd robot-configs
git checkout 47f1309
cd ..
sudo ./robot-configs/install.sh
rm -rf robot-configs
sudo setup_robot_configuration rosbot_xl ros2_humble