Notes so far to run webui and rviz:
Use Remmina Remote Desktop Client
line 1: sudo apt update
line 2: sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(Note: above line, the copy and paste does not work. So, use the one provided by Lukasz earlier.)
line 3: sudo apt-key del 421C365BD9FF1F717815A3895523BAEEB01FA116
line 4: sudo apt install python-pip
line 5: python -m pip install --user tornado==4.5.3 python-wifi ifparser
line 5a. pip install --upgrade pip
Returns: Traceback (most recent call last):
File “/usr/bin/pip”, line 9, in
from pip import main
ImportError: cannot import name main
Create new work space and change directory
line 5b: mkdir ~/ros_workspace
line 5c: cd ~/ros_workspace/src
Clone repository containing rosbot webui:
line 5d: git clone GitHub - husarion/rosbot_webui
Clone husarion_ros repository:
line 5e: git clone GitHub - husarion/husarion_ros: Package containing some nodes specific for Husarion robots.
Change directory and build code using catkin_make:
line 5f: cd ~/ros_workspace
line 5g: catkin_make
Add environmental variables by executing this in Linux command line:
line 5h: source devel/setup.sh
line 6: sudo apt install ros-kinetic-rosbridge-suite ros-kinetic-web-video-server
line 6a: sudo apt install ros-kinetic-rqt-tf-tree
line 7: roslaunch rosbot_webui demo.launch
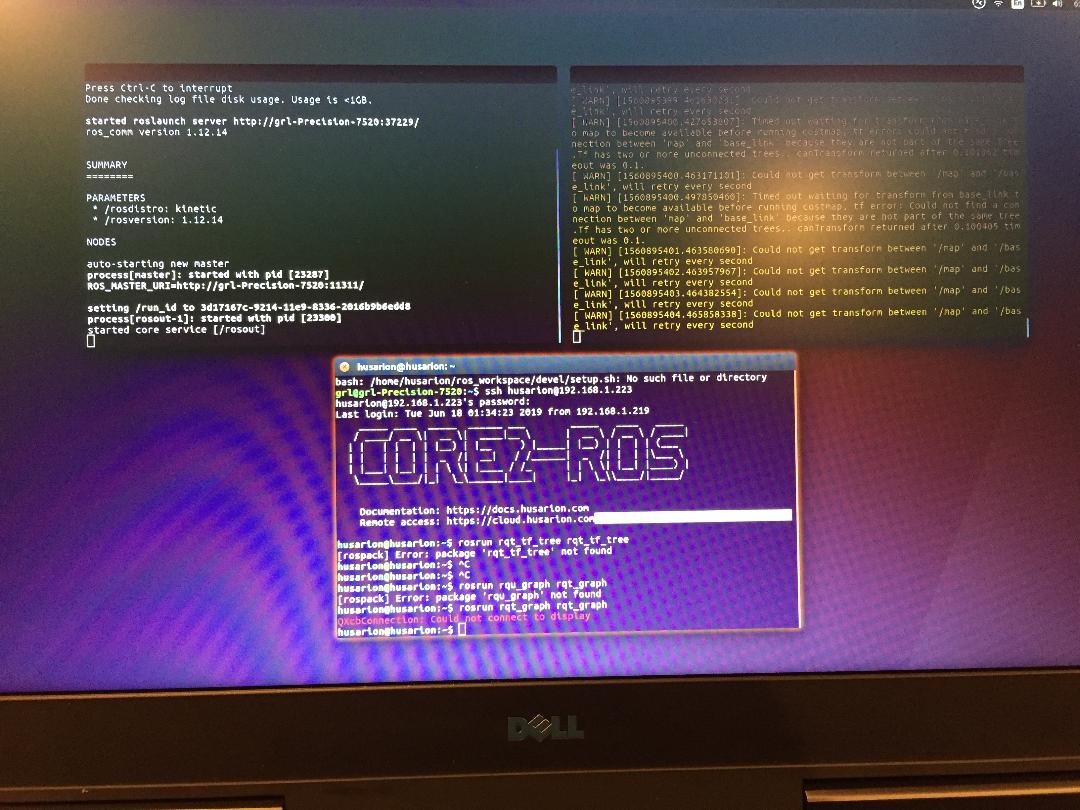
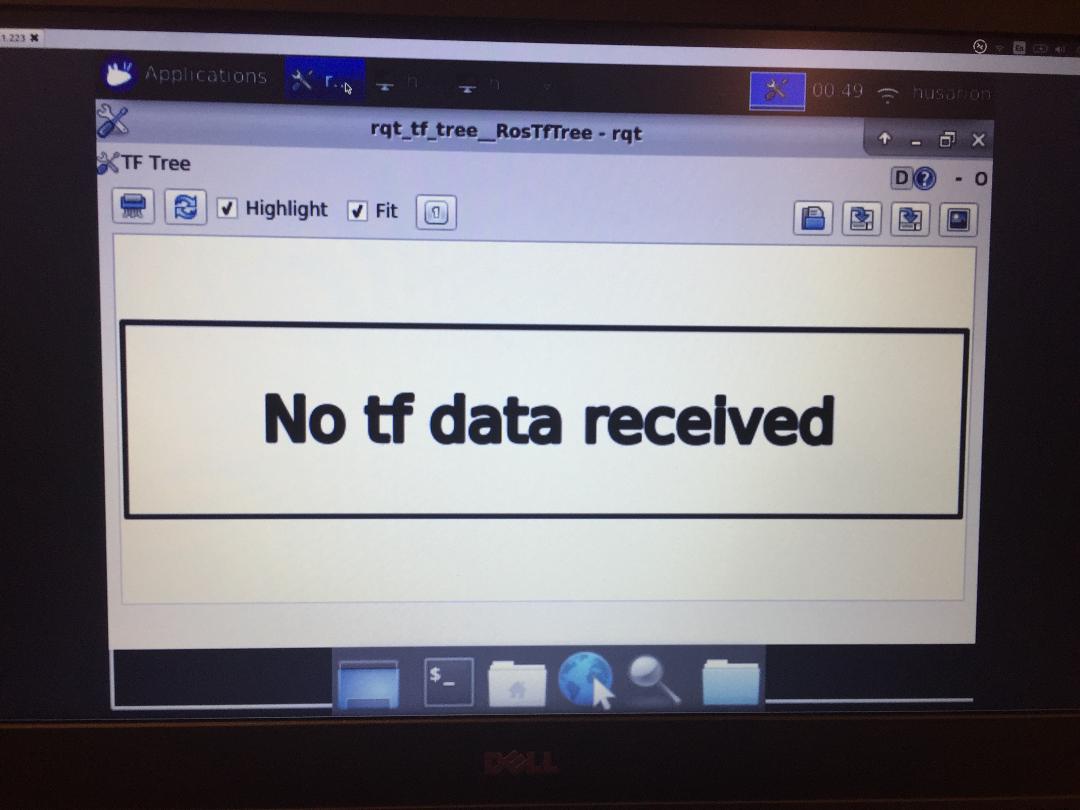
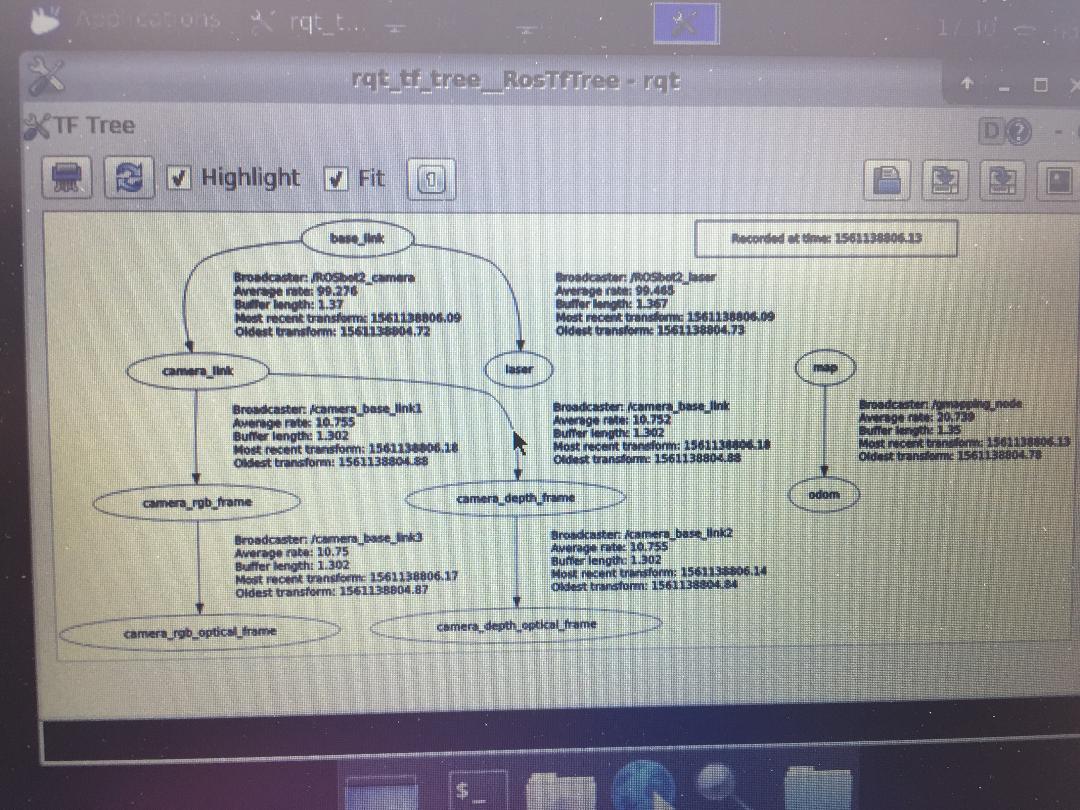
After updating ubuntu and cold boot, running graph and tree code,
rosrun rqt_tf_tree rqt_tf_tree, and
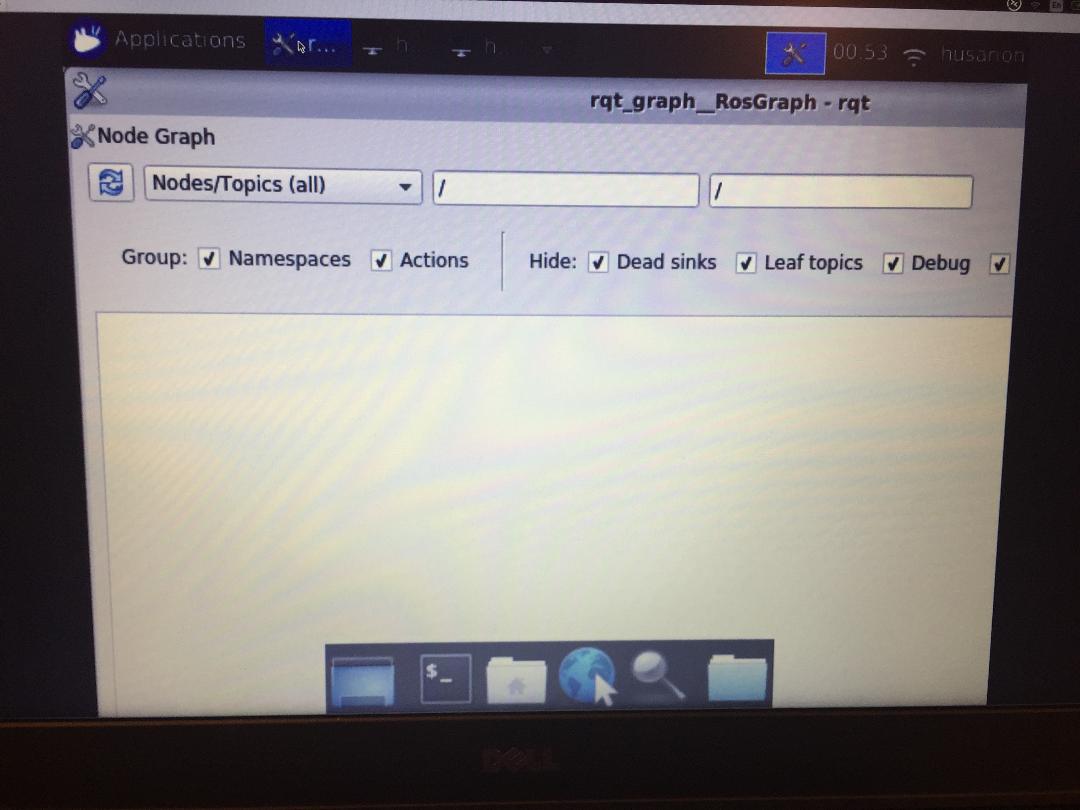
rosrun rqt_graph rqt_graph
I get the following:
And After webui launch code:
husarion@husarion:~/ros_workspace$ roslaunch rosbot_webui demo.launch
… logging to /home/husarion/.ros/log/e2d1f416-944d-11e9-b24f-409f384ed2fb/roslaunch-husarion-21559.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://husarion:33026/
SUMMARY
PARAMETERS
- /camera/camera_nodelet_manager/num_worker_threads: 4
- /camera/depth_rectify_depth/interpolation: 0
- /camera/driver/auto_exposure: True
- /camera/driver/auto_white_balance: True
- /camera/driver/bootorder: 0
- /camera/driver/color_depth_synchronization: False
- /camera/driver/depth_camera_info_url:
- /camera/driver/depth_frame_id: camera_depth_opti…
- /camera/driver/depth_registration: False
- /camera/driver/device_id: #1
- /camera/driver/devnums: 1
- /camera/driver/rgb_camera_info_url:
- /camera/driver/rgb_frame_id: camera_rgb_optica…
- /explore_server/explore_costmap/explore_boundary/explore_clear_space: False
- /explore_server/explore_costmap/explore_boundary/frontier_travel_point: middle
- /explore_server/explore_costmap/explore_boundary/resize_to_boundary: False
- /explore_server/explore_costmap/footprint: [[0.1, 0.12], [0…
- /explore_server/explore_costmap/global_frame: map
- /explore_server/explore_costmap/inflation/inflation_radius: 0.2
- /explore_server/explore_costmap/plugins: [{‘type’: 'costma…
- /explore_server/explore_costmap/publish_frequency: 5
- /explore_server/explore_costmap/robot_base_frame: base_link
- /explore_server/explore_costmap/static/map_topic: /map
- /explore_server/explore_costmap/static/subscribe_to_updates: True
- /explore_server/explore_costmap/transform_tolerance: 5
- /explore_server/explore_costmap/update_frequency: 5
- /explore_server/frequency: 1.0
- /explore_server/goal_aliasing: 0.1
- /move_base/TrajectoryPlannerROS/acc_lim_Y: 2.5
- /move_base/TrajectoryPlannerROS/acc_lim_theta: 0.25
- /move_base/TrajectoryPlannerROS/acc_lim_x: 2.5
- /move_base/TrajectoryPlannerROS/holonomic_robot: False
- /move_base/TrajectoryPlannerROS/max_vel_theta: 0.35
- /move_base/TrajectoryPlannerROS/max_vel_x: 0.2
- /move_base/TrajectoryPlannerROS/meter_scoring: True
- /move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
- /move_base/TrajectoryPlannerROS/min_vel_theta: -0.35
- /move_base/TrajectoryPlannerROS/min_vel_x: 0.1
- /move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.15
- /move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.25
- /move_base/controller_frequency: 10.0
- /move_base/global_costmap/always_send_full_costmap: True
- /move_base/global_costmap/footprint: [[0.1, 0.12], [0…
- /move_base/global_costmap/global_frame: map
- /move_base/global_costmap/height: 5
- /move_base/global_costmap/inflation_radius: 0.7
- /move_base/global_costmap/laser_scan_sensor/clearing: True
- /move_base/global_costmap/laser_scan_sensor/data_type: LaserScan
- /move_base/global_costmap/laser_scan_sensor/marking: True
- /move_base/global_costmap/laser_scan_sensor/sensor_frame: laser
- /move_base/global_costmap/laser_scan_sensor/topic: scan
- /move_base/global_costmap/map_topic: /map
- /move_base/global_costmap/observation_sources: laser_scan_sensor
- /move_base/global_costmap/obstacle_range: 6.0
- /move_base/global_costmap/origin_x: -2.5
- /move_base/global_costmap/origin_y: -2.5
- /move_base/global_costmap/publish_frequency: 1
- /move_base/global_costmap/raytrace_range: 8.0
- /move_base/global_costmap/resolution: 0.01
- /move_base/global_costmap/robot_base_frame: base_link
- /move_base/global_costmap/rolling_window: True
- /move_base/global_costmap/static_map: False
- /move_base/global_costmap/subscribe_to_updates: True
- /move_base/global_costmap/transform_tolerance: 5
- /move_base/global_costmap/update_frequency: 1
- /move_base/global_costmap/width: 5
- /move_base/local_costmap/always_send_full_costmap: True
- /move_base/local_costmap/footprint: [[0.1, 0.12], [0…
- /move_base/local_costmap/global_frame: map
- /move_base/local_costmap/height: 3
- /move_base/local_costmap/inflation_radius: 0.4
- /move_base/local_costmap/laser_scan_sensor/clearing: True
- /move_base/local_costmap/laser_scan_sensor/data_type: LaserScan
- /move_base/local_costmap/laser_scan_sensor/marking: True
- /move_base/local_costmap/laser_scan_sensor/sensor_frame: laser
- /move_base/local_costmap/laser_scan_sensor/topic: scan
- /move_base/local_costmap/map_topic: /map
- /move_base/local_costmap/observation_sources: laser_scan_sensor
- /move_base/local_costmap/obstacle_range: 6.0
- /move_base/local_costmap/origin_x: -1.5
- /move_base/local_costmap/origin_y: -1.5
- /move_base/local_costmap/publish_frequency: 2.5
- /move_base/local_costmap/raytrace_range: 8.0
- /move_base/local_costmap/resolution: 0.01
- /move_base/local_costmap/robot_base_frame: base_link
- /move_base/local_costmap/rolling_window: True
- /move_base/local_costmap/static_map: False
- /move_base/local_costmap/subscribe_to_updates: True
- /move_base/local_costmap/transform_tolerance: 5
- /move_base/local_costmap/update_frequency: 2.5
- /move_base/local_costmap/width: 3
- /move_base/recovery_behavior_enabled: True
- /rosapi/params_glob: [*]
- /rosapi/services_glob: [*]
- /rosapi/topics_glob: [*]
- /rosbridge_websocket/address:
- /rosbridge_websocket/authenticate: False
- /rosbridge_websocket/bson_only_mode: False
- /rosbridge_websocket/delay_between_messages: 0
- /rosbridge_websocket/fragment_timeout: 600
- /rosbridge_websocket/max_message_size: None
- /rosbridge_websocket/params_glob: [*]
- /rosbridge_websocket/port: 9090
- /rosbridge_websocket/retry_startup_delay: 5
- /rosbridge_websocket/services_glob: [*]
- /rosbridge_websocket/topics_glob: [*]
- /rosbridge_websocket/unregister_timeout: 10
- /rosbridge_websocket/use_compression: False
- /rosdistro: kinetic
- /rosversion: 1.12.14
- /rplidarNode/angle_compensate: True
- /rplidarNode/frame_id: laser
- /rplidarNode/inverted: False
- /rplidarNode/serial_baudrate: 115200
- /rplidarNode/serial_port: /dev/ttyUSB0
- /webvideo4/address: ::
- /webvideo4/port: 8082
NODES
/camera/
camera_nodelet_manager (nodelet/nodelet)
depth_metric (nodelet/nodelet)
depth_metric_rect (nodelet/nodelet)
depth_points (nodelet/nodelet)
depth_rectify_depth (nodelet/nodelet)
depth_registered_sw_metric_rect (nodelet/nodelet)
driver (nodelet/nodelet)
points_xyzrgb_sw_registered (nodelet/nodelet)
register_depth_rgb (nodelet/nodelet)
rgb_rectify_color (nodelet/nodelet)
/
ROSbot2_camera (tf/static_transform_publisher)
ROSbot2_laser (tf/static_transform_publisher)
bridge (rosbot_webui/serial_bridge.sh)
camera_base_link (tf/static_transform_publisher)
camera_base_link1 (tf/static_transform_publisher)
camera_base_link2 (tf/static_transform_publisher)
camera_base_link3 (tf/static_transform_publisher)
depth_clipping_node (husarion_ros/depth_clipping_node)
explore_client (frontier_exploration/explore_client)
explore_server (frontier_exploration/explore_server)
gmapping_supervisor (rosbot_webui/gmapping_supervisor.py)
move_base (move_base/move_base)
pose_to_tf_transform (rosbot_webui/pose_to_tf_transform)
rosapi (rosapi/rosapi_node)
rosbridge_websocket (rosbridge_server/rosbridge_websocket)
rplidarNode (rplidar_ros/rplidarNode)
tf_to_pose (rosbot_webui/tf_to_pose)
webvideo4 (web_video_server/web_video_server)
wifi_publisher (husarion_ros/wifi.py)
auto-starting new master
process[master]: started with pid [21611]
ROS_MASTER_URI=http://master:11311
setting /run_id to e2d1f416-944d-11e9-b24f-409f384ed2fb
process[rosout-1]: started with pid [21648]
started core service [/rosout]
process[camera/camera_nodelet_manager-2]: started with pid [21671]
process[camera/driver-3]: started with pid [21672]
process[camera/rgb_rectify_color-4]: started with pid [21675]
process[camera/depth_rectify_depth-5]: started with pid [21676]
process[camera/depth_metric_rect-6]: started with pid [21677]
process[camera/depth_metric-7]: started with pid [21684]
process[camera/depth_points-8]: started with pid [21691]
process[camera/register_depth_rgb-9]: started with pid [21698]
process[camera/points_xyzrgb_sw_registered-10]: started with pid [21716]
process[camera/depth_registered_sw_metric_rect-11]: started with pid [21721]
process[camera_base_link-12]: started with pid [21726]
process[camera_base_link1-13]: started with pid [21741]
process[camera_base_link2-14]: started with pid [21754]
process[camera_base_link3-15]: started with pid [21758]
[ INFO] [1561139787.480080613]: Initializing nodelet with 4 worker threads.
process[rplidarNode-16]: started with pid [21765]
process[bridge-17]: started with pid [21784]
process[wifi_publisher-18]: started with pid [21802]
process[ROSbot2_laser-19]: started with pid [21820]
process[ROSbot2_camera-20]: started with pid [21826]
process[pose_to_tf_transform-21]: started with pid [21832]
process[tf_to_pose-22]: started with pid [21837]
process[depth_clipping_node-23]: started with pid [21843]
process[move_base-24]: started with pid [21850]
process[gmapping_supervisor-25]: started with pid [21863]
process[explore_client-26]: started with pid [21881]
process[explore_server-27]: started with pid [21887]
process[webvideo4-28]: started with pid [21891]
process[rosbridge_websocket-29]: started with pid [21901]
process[rosapi-30]: started with pid [21909]
[ INFO] [1561139788.994735290]: No matching device found… waiting for devices. Reason: std::__cxx11::string astra_wrapper::AstraDriver::resolveDeviceURI(const string&) @ /tmp/binarydeb/ros-kinetic-astra-camera-0.2.2/src/astra_driver.cpp @ 741 : Invalid device number 1, there are 0 devices connected.
[INFO] [1561139789.035983]: ROS Serial Python Node
[ INFO] [1561139789.050622092]: Please use the ‘Point’ tool in Rviz to select an exporation boundary.
[ INFO] [1561139789.078860368]: RPLIDAR running on ROS package rplidar_ros. SDK Version:1.7.0
[ERROR] [1561139789.079142410]: Error, cannot bind to the specified serial port /dev/ttyUSB0.
[INFO] [1561139789.092223]: wifi_status publisher node started
[INFO] [1561139789.251222]: Connecting to /dev/ttyCORE2 at 500000 baud
[rplidarNode-16] process has died [pid 21765, exit code 255, cmd /opt/ros/kinetic/lib/rplidar_ros/rplidarNode __name:=rplidarNode __log:=/home/husarion/.ros/log/e2d1f416-944d-11e9-b24f-409f384ed2fb/rplidarNode-16.log].
log file: /home/husarion/.ros/log/e2d1f416-944d-11e9-b24f-409f384ed2fb/rplidarNode-16*.log
[ WARN] [1561139789.316280406]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
registered capabilities (classes):
- rosbridge_library.capabilities.call_service.CallService
- rosbridge_library.capabilities.advertise.Advertise
- rosbridge_library.capabilities.publish.Publish
- rosbridge_library.capabilities.subscribe.Subscribe
- <class ‘rosbridge_library.capabilities.defragmentation.Defragment’>
- rosbridge_library.capabilities.advertise_service.AdvertiseService
- rosbridge_library.capabilities.service_response.ServiceResponse
- rosbridge_library.capabilities.unadvertise_service.UnadvertiseService
[ WARN] [1561139790.316780257]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[INFO] [1561139790.416122]: Rosbridge WebSocket server started on port 9090
started roslaunch server http://husarion:33359/
SUMMARY
PARAMETERS
- /rosdistro: kinetic
- /rosversion: 1.12.14
NODES
ROS_MASTER_URI=http://master:11311
process[gmapping_node-1]: started with pid [22363]
Started supervisor
True
[ WARN] [1561139791.317102836]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ INFO] [1561139791.995160175]: No matching device found… waiting for devices. Reason: std::__cxx11::string astra_wrapper::AstraDriver::resolveDeviceURI(const string&) @ /tmp/binarydeb/ros-kinetic-astra-camera-0.2.2/src/astra_driver.cpp @ 741 : Invalid device number 1, there are 0 devices connected.
[ WARN] [1561139792.317464558]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139793.317760717]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139794.318081146]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139794.838482897]: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between ‘map’ and ‘base_link’ because they are not part of the same tree.Tf has two or more unconnected trees… canTransform returned after 0.100991 timeout was 0.1.
[ WARN] [1561139794.910108921]: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between ‘map’ and ‘base_link’ because they are not part of the same tree.Tf has two or more unconnected trees… canTransform returned after 0.100349 timeout was 0.1.
[ INFO] [1561139794.995604859]: No matching device found… waiting for devices. Reason: std::__cxx11::string astra_wrapper::AstraDriver::resolveDeviceURI(const string&) @ /tmp/binarydeb/ros-kinetic-astra-camera-0.2.2/src/astra_driver.cpp @ 741 : Invalid device number 1, there are 0 devices connected.
[ WARN] [1561139795.318387343]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139796.318693310]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139797.318992630]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ INFO] [1561139797.995959967]: No matching device found… waiting for devices. Reason: std::__cxx11::string astra_wrapper::AstraDriver::resolveDeviceURI(const string&) @ /tmp/binarydeb/ros-kinetic-astra-camera-0.2.2/src/astra_driver.cpp @ 741 : Invalid device number 1, there are 0 devices connected.
[ WARN] [1561139798.319274802]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139799.319558492]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139799.873526278]: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between ‘map’ and ‘base_link’ because they are not part of the same tree.Tf has two or more unconnected trees… canTransform returned after 0.101009 timeout was 0.1.
[ WARN] [1561139799.939998574]: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between ‘map’ and ‘base_link’ because they are not part of the same tree.Tf has two or more unconnected trees… canTransform returned after 0.10008 timeout was 0.1.
[ WARN] [1561139800.319840201]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ INFO] [1561139800.996322035]: No matching device found… waiting for devices. Reason: std::__cxx11::string astra_wrapper::AstraDriver::resolveDeviceURI(const string&) @ /tmp/binarydeb/ros-kinetic-astra-camera-0.2.2/src/astra_driver.cpp @ 741 : Invalid device number 1, there are 0 devices connected.
[ WARN] [1561139801.320169803]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561139802.320467382]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
^C[rosapi-30] killing on exit
[rosbridge_websocket-29] killing on exit
[webvideo4-28] killing on exit
[explore_server-27] killing on exit
[explore_client-26] killing on exit
[gmapping_supervisor-25] killing on exit
[pose_to_tf_transform-21] killing on exit
[move_base-24] killing on exit
[depth_clipping_node-23] killing on exit
[gmapping_node-1] killing on exit
[tf_to_pose-22] killing on exit
[ROSbot2_camera-20] killing on exit
[ROSbot2_laser-19] killing on exit
[wifi_publisher-18] killing on exit
[bridge-17] killing on exit
[INFO] [1561139803.802552]: Send tx stop request
[camera_base_link3-15] killing on exit
[camera_base_link2-14] killing on exit
virtual GMapping::GridSlamProcessor::~GridSlamProcessor(): Start
virtual GMapping::GridSlamProcessor::~GridSlamProcessor(): Deleting tree
[camera_base_link1-13] killing on exit
[ INFO] [1561139803.996744145]: No matching device found… waiting for devices. Reason: std::__cxx11::string astra_wrapper::AstraDriver::resolveDeviceURI(const string&) @ /tmp/binarydeb/ros-kinetic-astra-camera-0.2.2/src/astra_driver.cpp @ 741 : Invalid device number 1, there are 0 devices connected.
Stopped
[camera_base_link-12] killing on exit
[camera/depth_registered_sw_metric_rect-11] killing on exit
[camera/points_xyzrgb_sw_registered-10] killing on exit
[camera/register_depth_rgb-9] killing on exit
[camera/depth_points-8] killing on exit
[camera/depth_metric-7] killing on exit
[camera/depth_metric_rect-6] killing on exit
[camera/depth_rectify_depth-5] killing on exit
[camera/rgb_rectify_color-4] killing on exit
[camera/driver-3] killing on exit
[camera/camera_nodelet_manager-2] killing on exit
[camera/camera_nodelet_manager-2] escalating to SIGTERM
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor…
… shutting down processing monitor complete